Half-Sized Micromouse
Half Sized micromouse is a new catagory other than classic full size micromouse.
The length and width for cell is half size of a full size maze, however, the total size for the maze remains the same, which means instead of 16x16 cells for classic micromouse, a half sized micromouse maze will be have 32x32 cells. This is much harder to build the robot in a smaller size besides the search process takes much longer time.
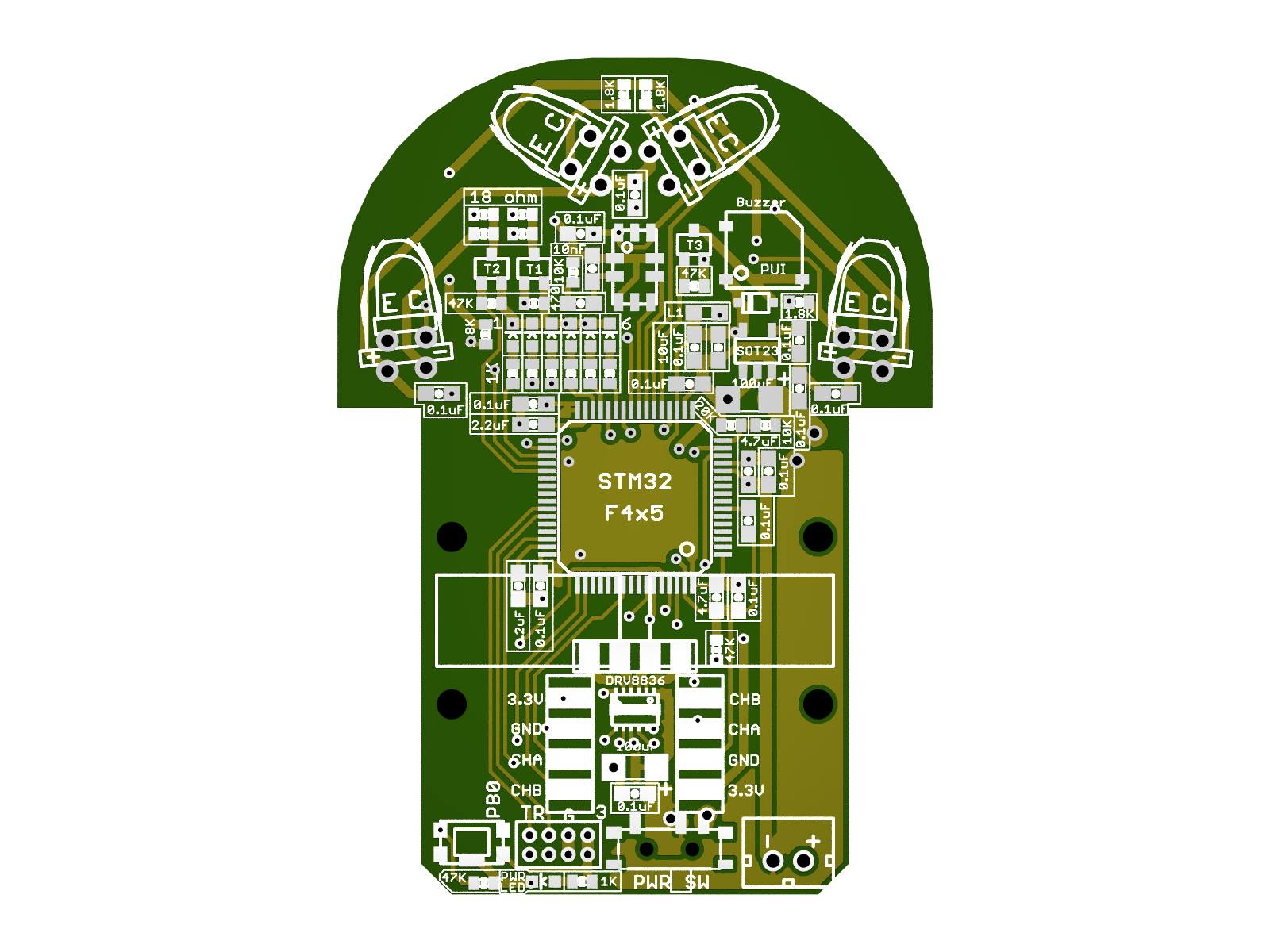
It's also extremely hard to put all components into such a small PCB
It's finally assembled and be able to run in a full size maze(since I don't have have half size maze yet)
I believe this is the first working half size micromouse ever in United States
| Name | Mini-G V1.1 |
| View |
|
| Width | 39mm |
| Length | 55mm |
| height | 14mm |
| weight | 18.8g w/ battery |
| wheel | 3D printed mount/wheels + D-Nano tyres(3.5mm wide) |
| Processor | STM32F405RGT6(168Mhz with internal RC) |
| Motor/Encoder | MK06-4.5/AS5145B |
| Gear ratio | 9:42 |
| battery | 70mah 1s1p |
| Motor Driver | DRV8836 |
| PWM frequency | 21K Hz |
| Sensor | TEFT4300+SFH4545 X 4 |
| Gyro | LY3100ALH |
| User Interface | 1xbottums+6LEDs |
| max straight speed | 0.85m/s max search for unknown cell, 3m/s max at speed run |
| max s-turn speed | 0.4m/s 90degree curve turn |
| diagonal run turn(max) | 90L ?m/s 90V ?m/s 45degree ?m/s 135degree ?m/s 180degree ?m/s |
| acceleration | variable acceleration rate up to 8m/s2 |
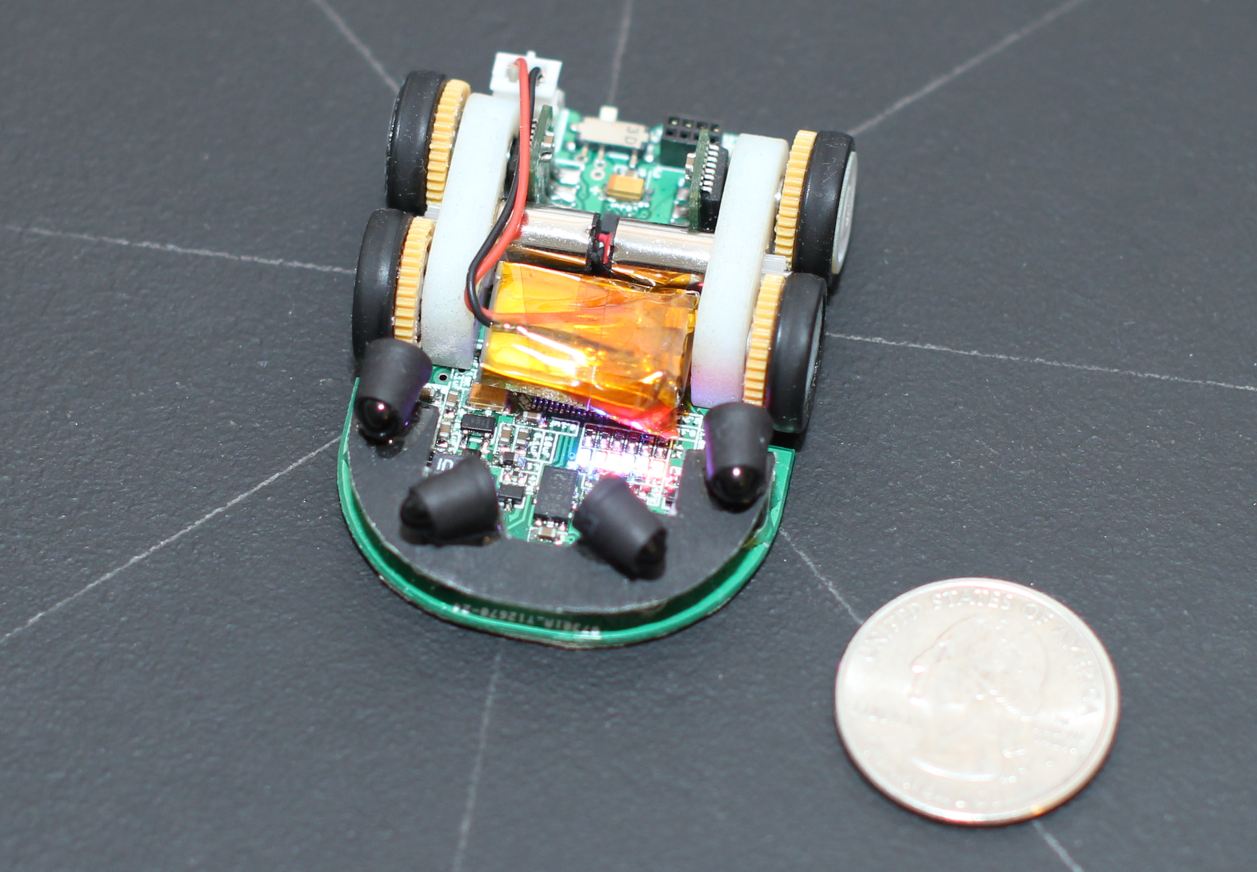
front view
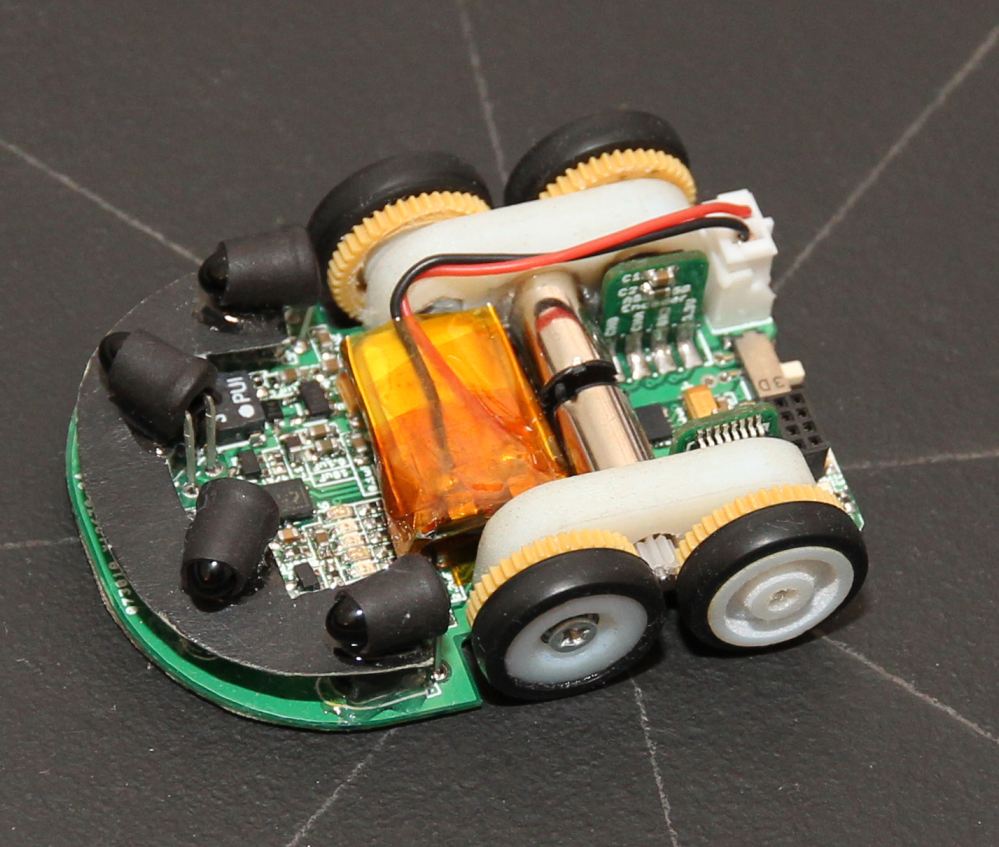
side view
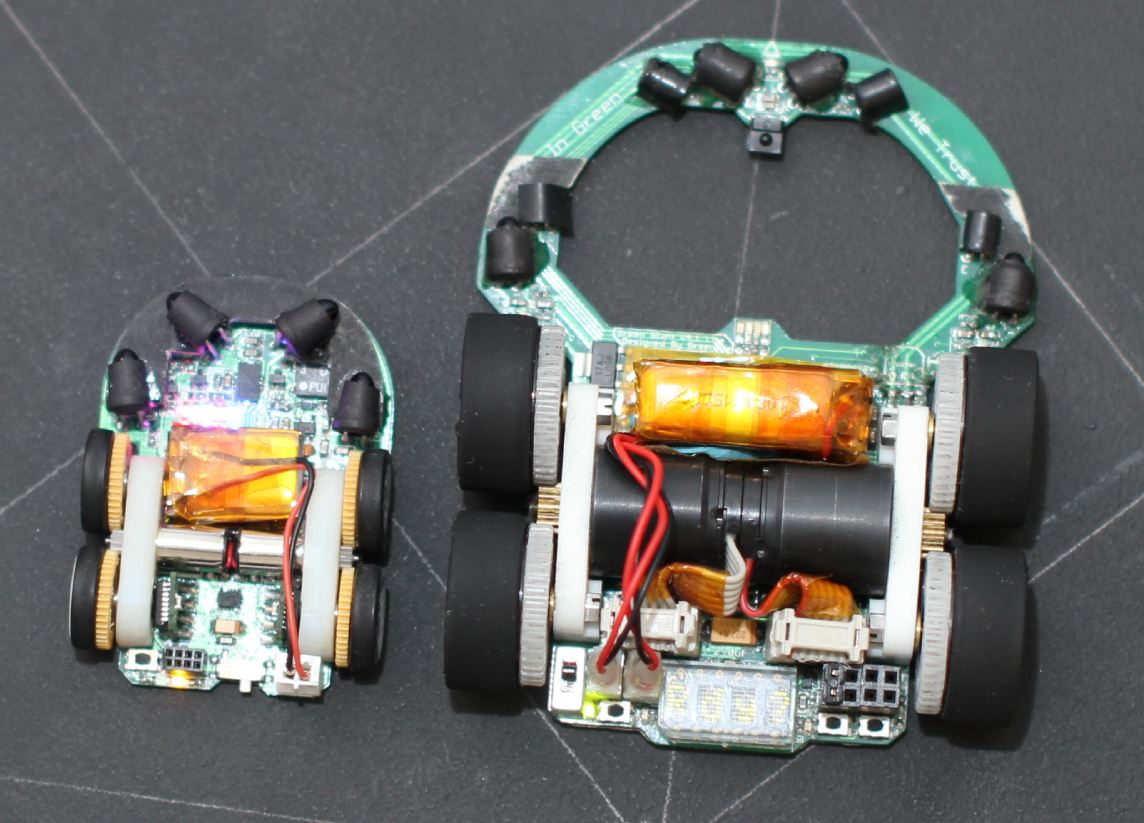
comparison with full size micromouse
A video that the mouse running in a classic size maze(since I don't have half-size maze for now)
================== design stage ===================
determine the specs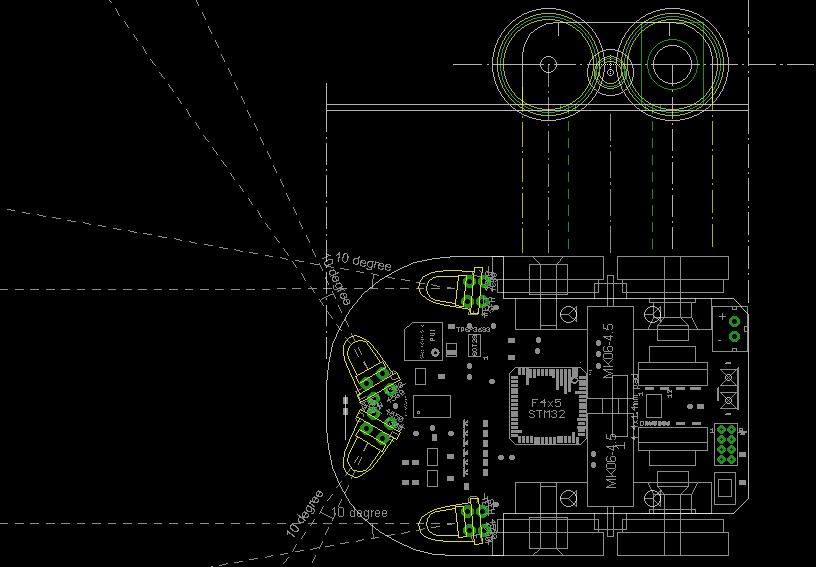
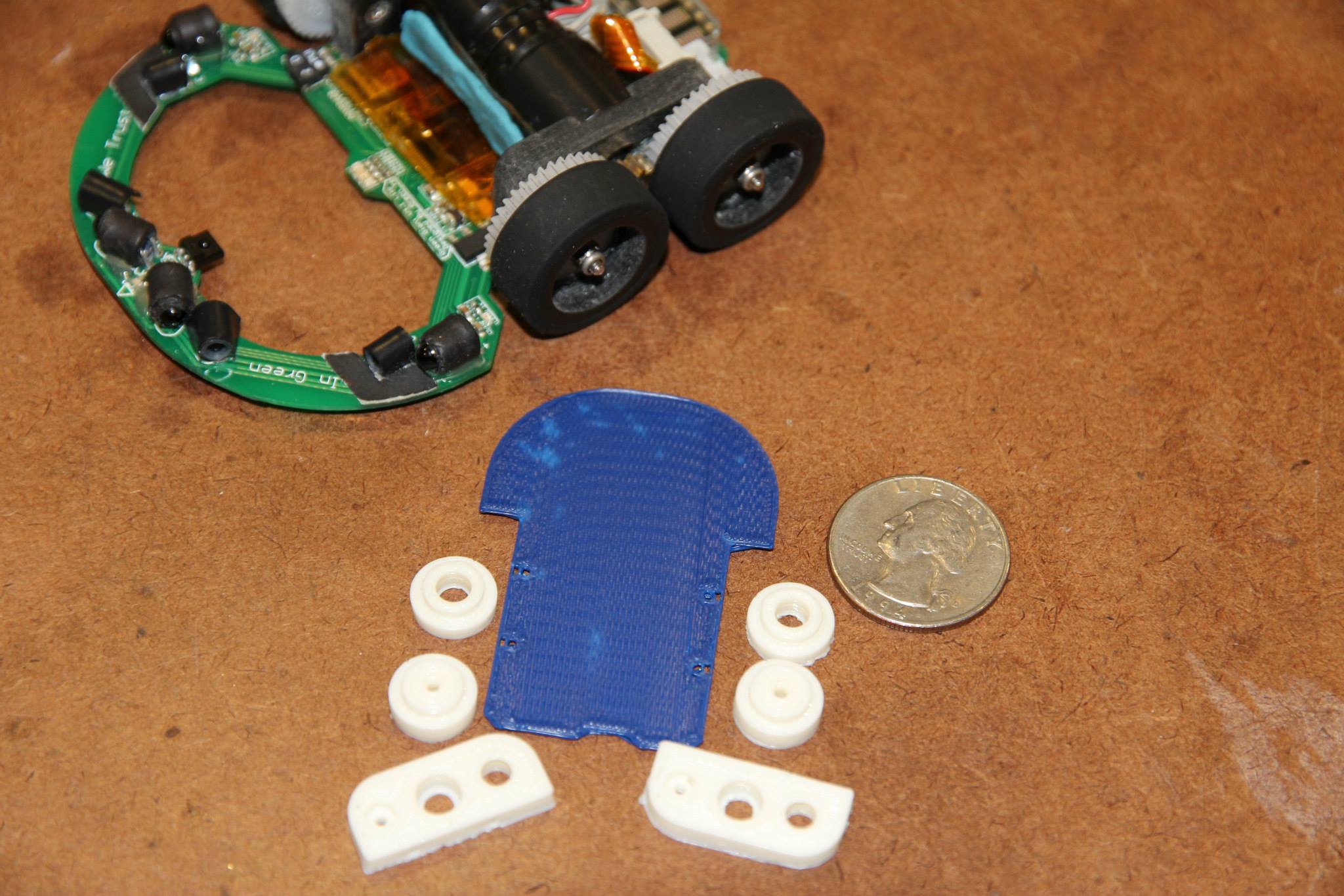
Tried to print about demo parts for
motor/encoder mount with makerbot for demo purpose