Micromouse 2011-2012
| This is the second year that I
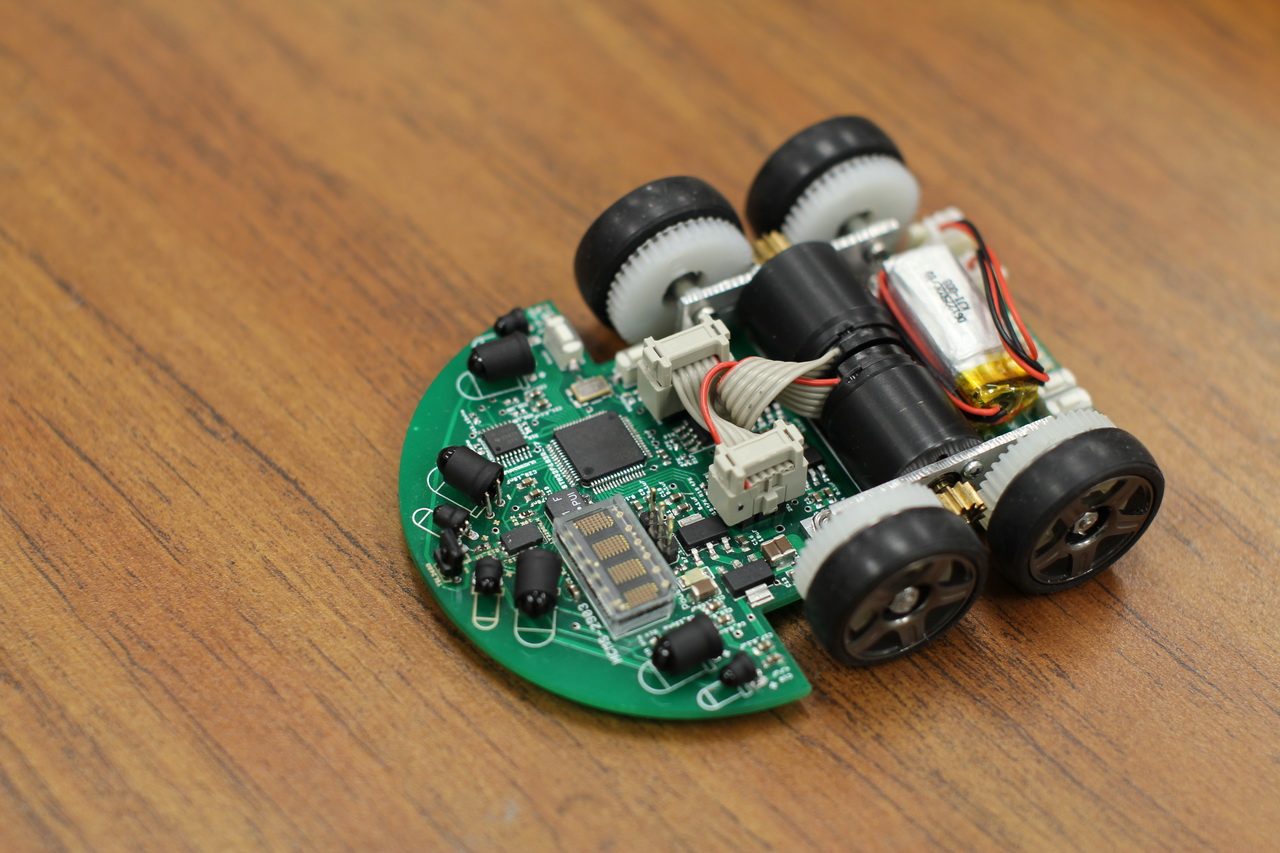
work on Micromouse, since I wasn't satisfy with the performance of the mouse from previous year, I did huge amount of research and made a brand-new, extremely competitive world class Micromouse. I put lots of efforts on doing research on STM32 and how to make a perfect motor mount in order to make this tiny 4-wheeled robot gets perfect balanced. |
| Name | Green Giant 1.3+ |
| View |
|
| Width | 75mm |
| Length | 97.5mm |
| wheel | Mini-z wheels+tyres |
| Processor | STM32F103RET7 |
| Motor/Encoder | Fauhalber 1717R(6V)+IE2 512 |
| Gear ratio | 12:40 |
| battery | 110mAh X 2 |
| Motor Driver | Zetex ZXMHC3A01T8+Max4427 |
| PWM frequency | 64K Hz |
| Sensor | TEFT4300+SFH4511 X 4 |
| User Interface | 2xbutton+6LEDs+HCMS2903LED Display |
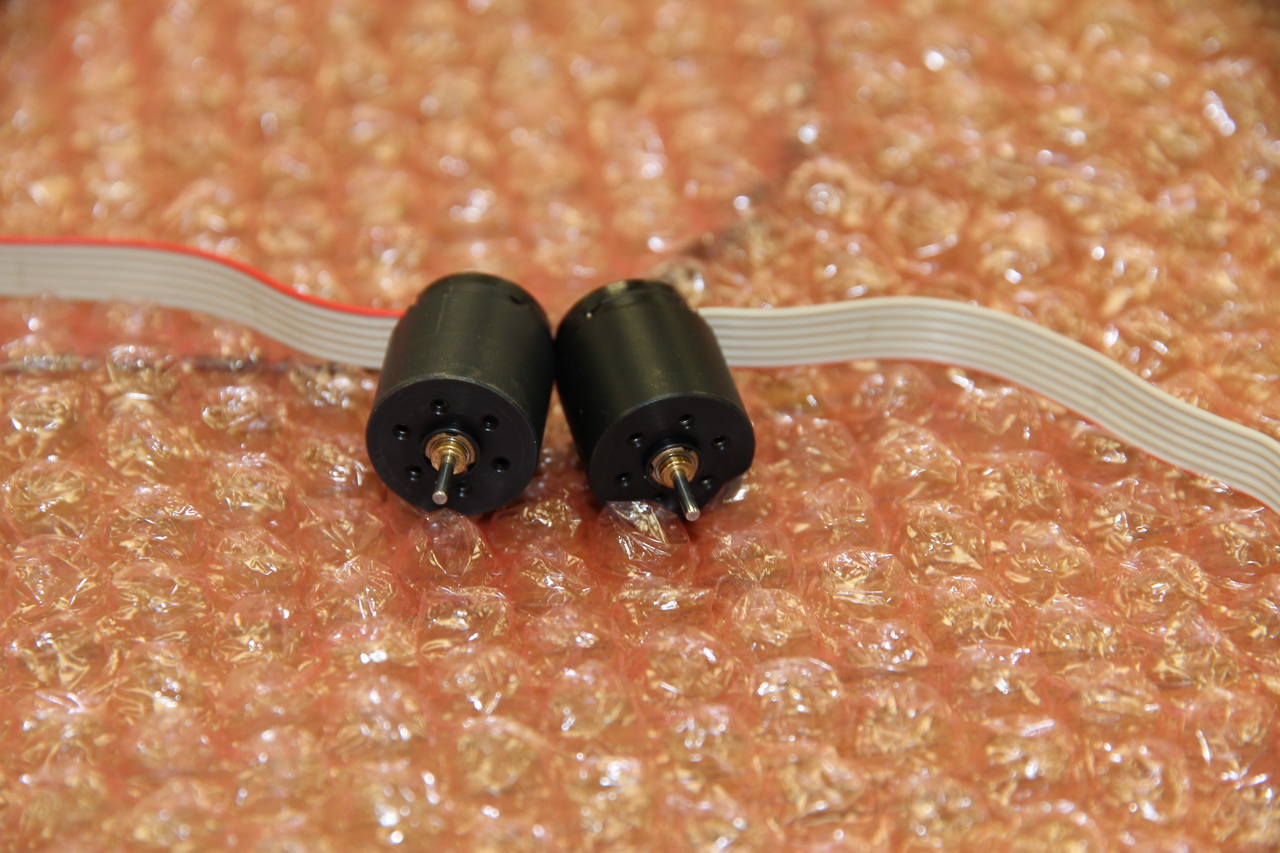
the Fauhalber Motor/encoder I am using
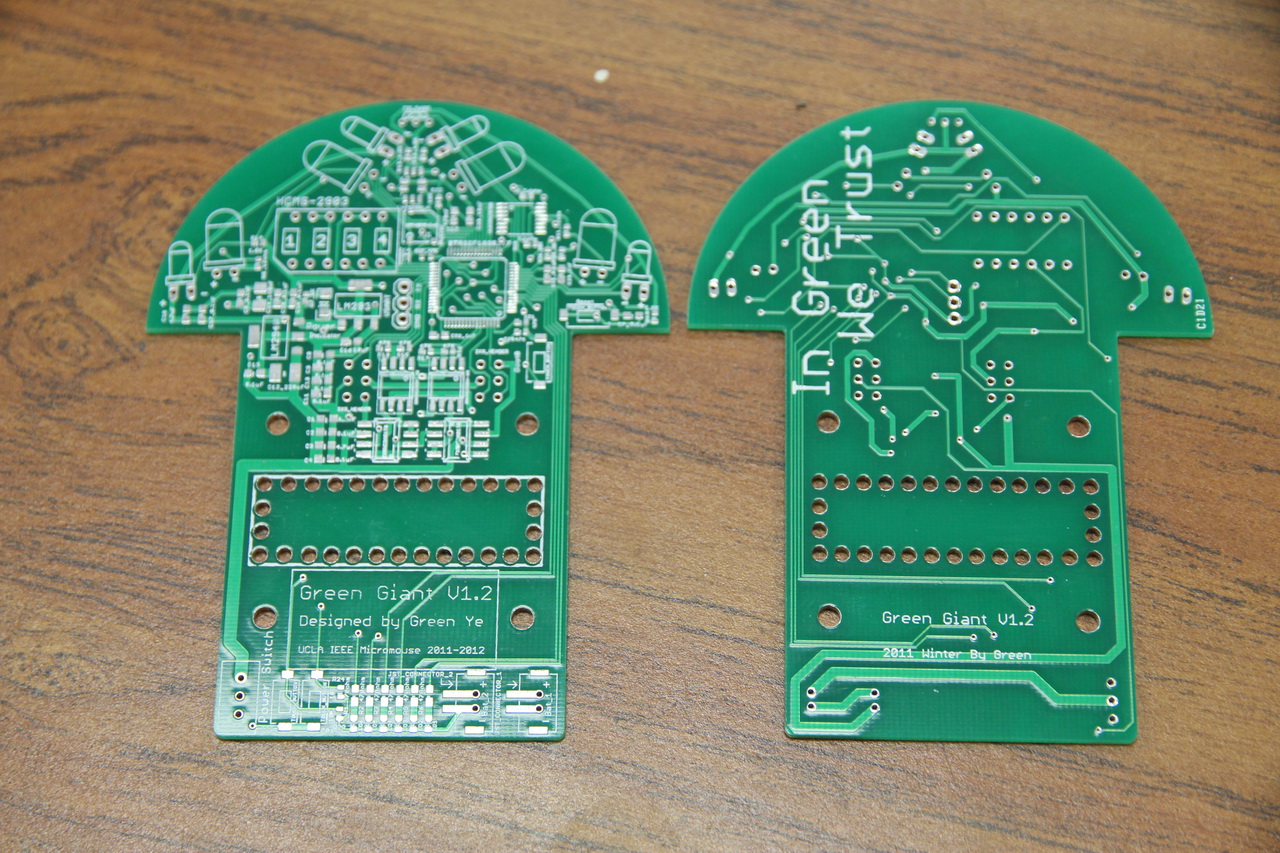
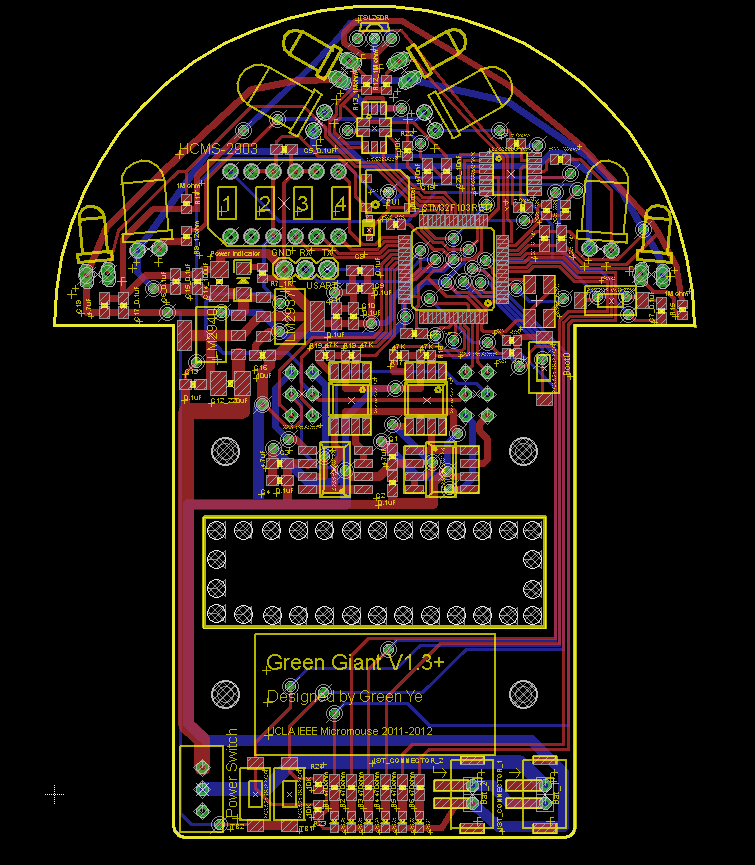
Front Back View of the Micromouse Chassis PCB design
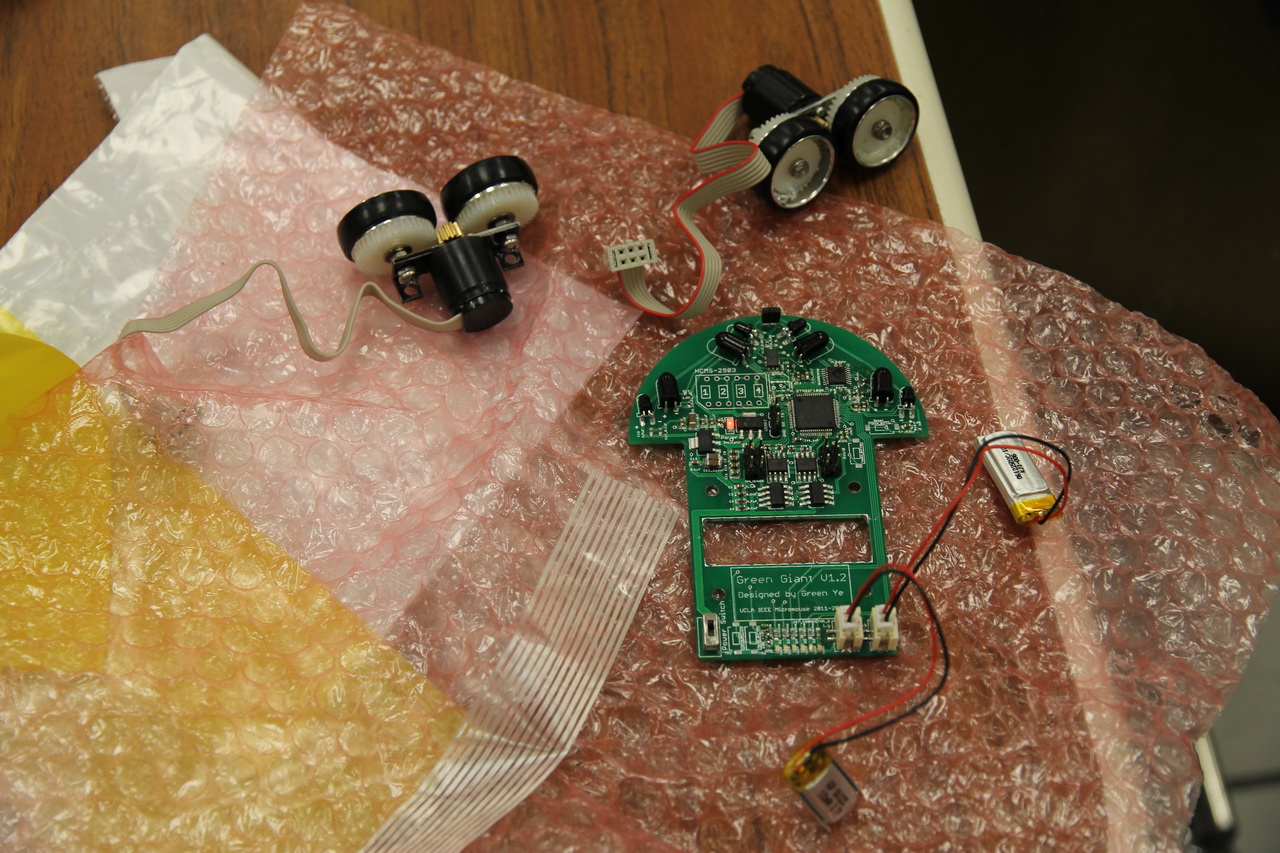
I worked at machine workshop to make these two motor/gear/wheel mount
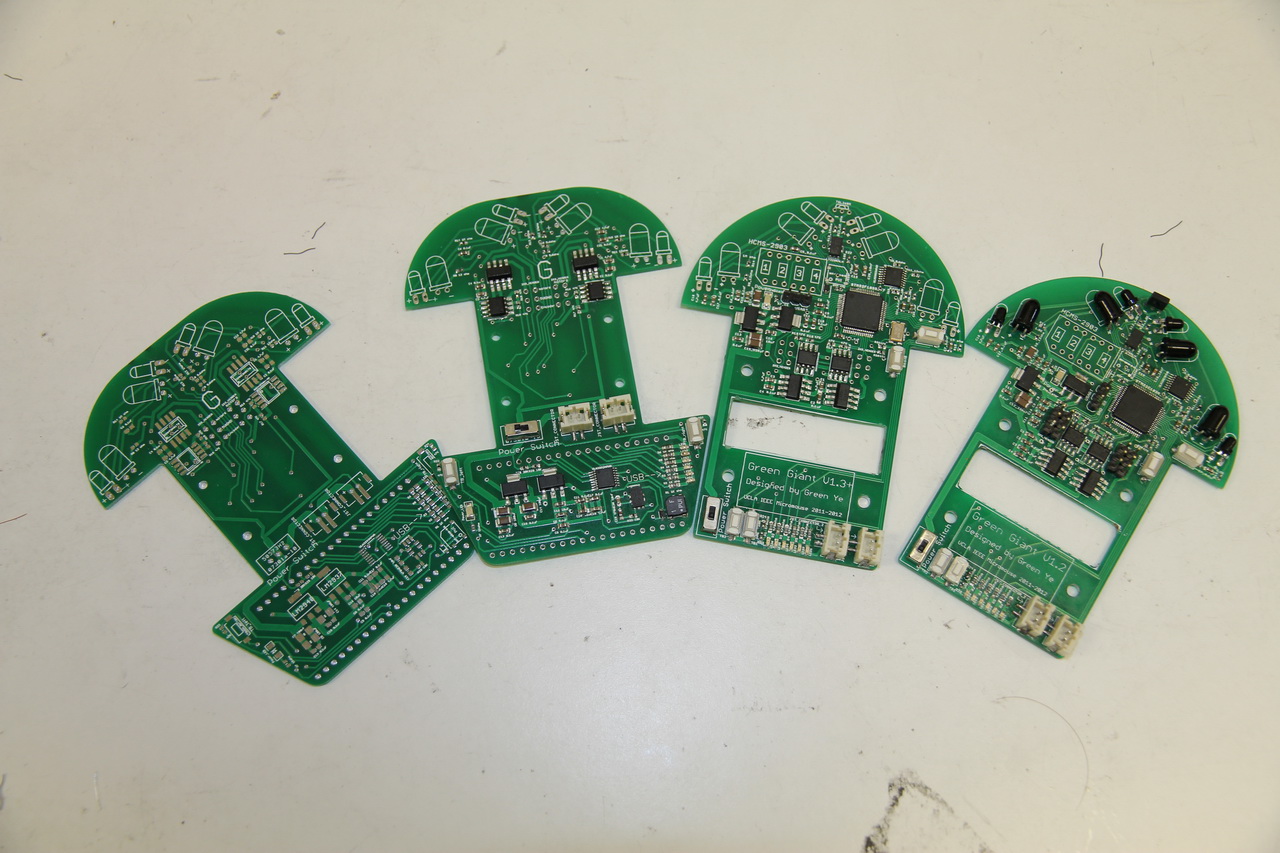
2 boards on the left are my back up mouse
2nd one from left was the the lastest update for my STM32 micromouse
It's completely constructed after I received all replacement parts
{kind=link}